
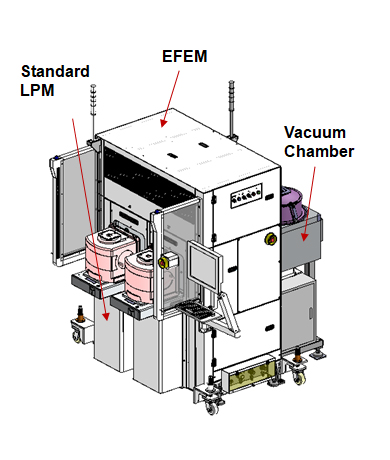
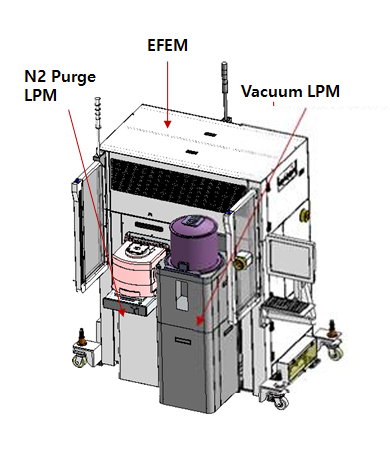
EFEM(Equipment Front End Module)
EFElM 包含多达 4 个装载端口、2 个大气机器人、2 个缓冲单元、2 个晶圆居中和抓取对准单元以及 2 个风扇过滤器单元,以保持 EFEM 内部的清洁度。
| Standard EFEM | N2 Purge EFEM | Vacuum Pod Transfer System |
 |  |
特征
各种大气机器人和预对准器可采用单臂、双臂、翻转机器人等。
带 GN-PAD 的被动末端执行器 - 防止晶圆碎裂、颗粒
使用多种类型的预对准器自动准确地对准晶圆。
可靠的装载端口模块和氮气吹扫的 FOUP(选项)。
三星和 SK 海力士规格。 符合SEMl标准的满意度
与所有工艺和计量设备轻松集成。
Standard EFEM
 | 特征
|
N2 Purge EFEM
 | 特征
|
真空吊舱传送系统/Vacuum Pod Transfer System
随着半导体器件超精细集成化的进展,暴露在外部的衬底的污染或氧化会导致成品率和工艺缺陷问题,因此需要通过完全阻挡外界空气来保持真空环境以防止氧化或污染。
Vacuum chamber Type
 | 特征
|
Vacuum LPM type
 | 特征
|
 售前咨询专员
售前咨询专员
